
芯片采购网专注于整合国内外授权IC代理商现货资源,芯片库存实时查询,行业价格合理,采购方便IC芯片,国内专业芯片采购平台。
0 引言
如今,随着网络信息技术的快速发展和人们对机电等理工科研究的深入,惯性导航技术日新月异。控制技术在惯性导航系统中起着至关重要的作用,目前大多数平台惯性控制采用经典的频域控制设计方法。随着控制技术的发展,鲁棒控制理论也得到了极大的发展,对控制对象的不确定性和结构摄入具有更好的控制效果。本文采用鲁棒H∞控制平台稳定电路的控制,通过选择合适的权力函数将平台稳定电路的控制问题转化为H∞ 混合灵敏度问题采用混合灵敏度优化设计了满足性能要求的控制器,通过特殊的双线变换方法解决了虚轴极端平台稳定电路原系统对象模型的病理问题。最后,控制器的可行性通过器的可行性。
1 液浮陀螺平台稳定回路的原理
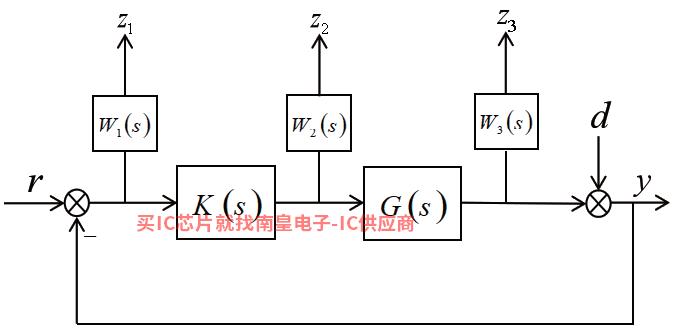
三轴惯性平台有三条伺服回路通道,其原理基本相同。干扰力矩时M f 当作用于平台框架轴时,平台旋转相对惯性空间。液浮陀螺对此偏转角度敏感后,输入相应的调宽信号,放大器放大后反馈给控制装置。控制装置在稳定电机上产生控制信号,稳定电机产生相反方向的校正扭矩,将平台移动到原偏离的相反方向,使平台与惯性空间的夹角逐渐减少到0,最终使平台相对于惯性空间保持稳定。
2 平台稳定回路建模
2.1 稳定回路的组成
一般稳定电路由惯性平台、三环框架、陀螺仪、扭矩电机、坐标变换器和控制电路组成。具体组成Md 扭矩电机,Mf稳定电路外部干扰力矩。 方向稳定电路由横滚稳定电路和俯仰稳定电路组成,无耦合放大器和伺服分解器。
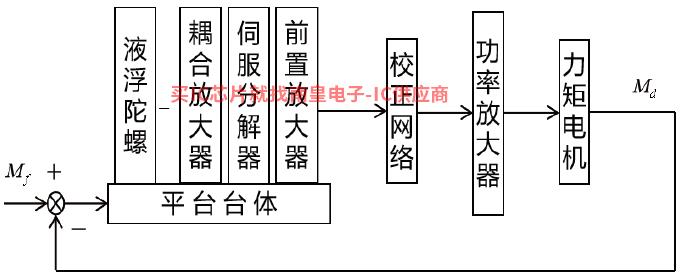
图1 由平台稳定回路组成
2.2 数学模型稳定回路
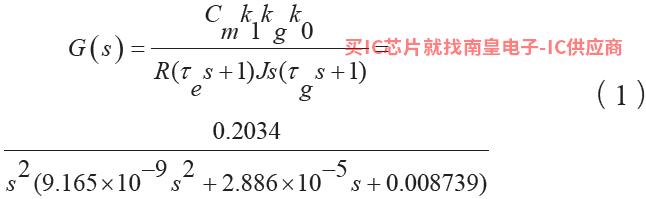
图2 方向稳定电路控制框图,θ ′ 稳定电路输入角度,θ 陀螺输出角,k1 放大桥式功率系数,k2 为传感器、前放大、相敏解调和低通滤波放大系数,τ g 陀螺时间常数,kg 将系数传递给陀螺,τ e 为电机时间常数, J 为平台旋转惯量。稳定电路的开环传输函数不考虑校正装置
3 常规PID控制
PID 控制器是控制系统中最常用的控制器,具有结构简单、调整方便、稳定性好、工作可靠等优点。PID 控制主要依靠被控制系统的输出值与目标值之间的偏差和实际经验。平台稳定电路通常采用双闭环控制,即电流环PI 控制,位置环PID 控制,控制框图。
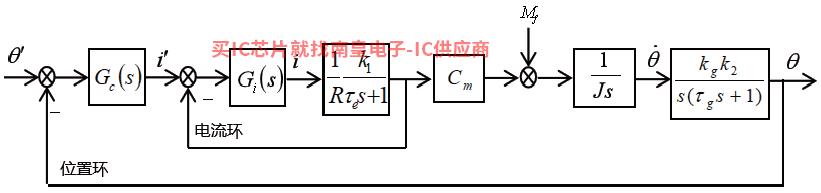
图2 稳定回路双闭环控制
3.1 电流环PI控制
电流环反馈可自动调节扭矩电机的驱动电流,大大降低载体角运动和干扰扭矩引起的扭矩电机输出扭矩波动,提高系统性能。
未校正的前电流环开环传输函数

采用PI 实现电流环控制,控制器

根据工程实际情况,这里取电流环的开环截止频率为 1 800~2 000 rad / s,此时,取电流环校正函数

可得电流环闭环传递函数

为便于计算,忽略分子、分母的高阶系数项,将上式简化为一阶环节,得到式:

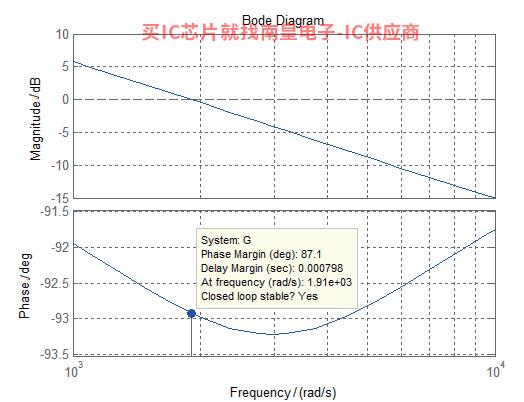
加入校正环节后,电流环的开环bode 图。
控制后开环系统的截止频率为 1 910 rad / s,相位裕度为87.1°。
其中, S 和T 分别称为灵敏度函数和补充灵敏度函数,两者满足:T (s) = I ? S (s)。灵敏度函数S (s)是决定跟踪误差大小的重要指标,S (s)增益越低,系统跟踪误差越小,系统响应的质量指标越好;补充灵敏度函数T (s)鲁棒决定了系统Epson代理降低稳定性的重要指标T (s)增益可以减少模型不确定性对系统的影响。T (s) = I ? S (s),不可能同时降低S和T通常干扰信号多为低频信号,系统不确定性发生高频,因此在选择权函数上可以对两者进行分频段折衷。
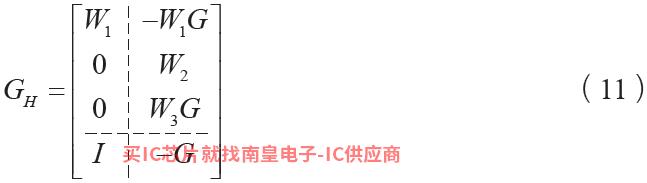
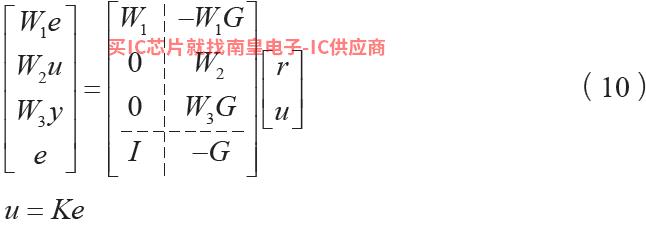
其中,增广对象模型为
简单得到简单的推导,
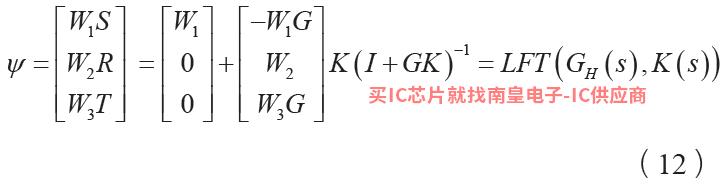
上右端是目标函数的线性分式变换形式。因此,稳定系统内部,满足设计指标ψ ∞ <1的控制器K (s)问题可以归结为增加被控对象G s H( )所对应的H∞ 解决标准设计问题K (s)的问题。
在本文中,图5中G(s)总被控对象由扭矩电机、平台体和液浮陀螺组成,代入具体值:

按照图5 设置给定信号0的混合灵敏度控制结构图2 等效变换为H∞标准控制结构,。虚线框是一个扩展对象,它包含原始控制对象 G(s) W1 、W2 、W3 三个权函数。
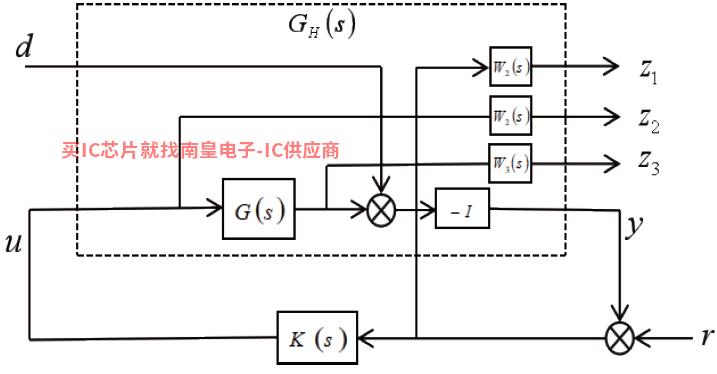
图5 方向稳定回路H∞结构图的标准控制
5 混合灵敏度H∞设计控制器
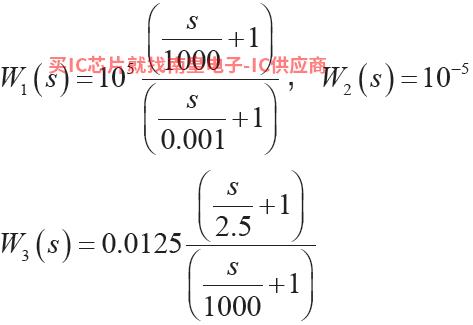
5.1 选择权函数
在设计控制器时,加权阵的选择是首要任务,它决定了系统灵敏度函数和补充灵敏度函数频域特性的形状,然后直接决定了整个系统的动态、稳定性和鲁棒性。加权阵的选择应遵循以下规则:
1)最终设计的控制器与广义被控对象同阶,因此在满足设计要求的情况下,尽量减少加权阵列的阶段。
2)灵敏度函数S (s)它决定了系统的跟踪性能,系统抑制扰动能力越小,系统跟踪性能越好,
由于
图 7(a)(b) 描述系统灵敏度函数S(s)和权函数

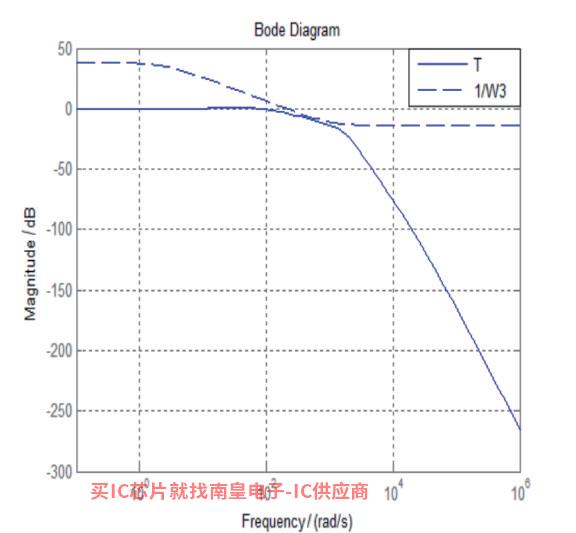

图7 奇异值曲线
WS 1 应满足系统跟踪和干扰抑制性能的要求 这一必要条件,即
这一必要条件,即 从图7(a) 设计的控制器满足系统性能要求。W3T应满足系统鲁棒稳定性的要求
从图7(a) 设计的控制器满足系统性能要求。W3T应满足系统鲁棒稳定性的要求 这一必要条件,即满足
这一必要条件,即满足 从图7(b) 从图中可以看出,高频段抑制了补灵敏度函数,设计的控制器满足了系统性能的要求。
从图7(b) 从图中可以看出,高频段抑制了补灵敏度函数,设计的控制器满足了系统性能的要求。
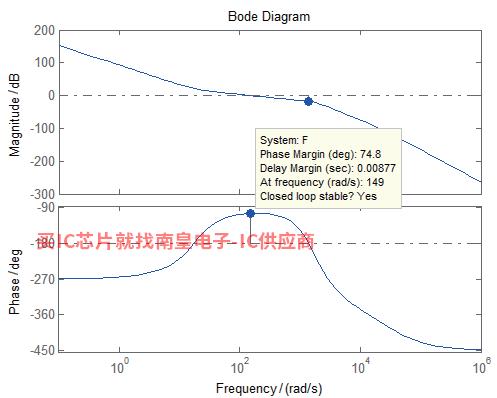
图8 H∞在系统开环传递函数曲线的控制下
从图8 可以看出,系统的截止频率ωc =149 rad / s,相位裕度为74.8°,满足鲁棒精度和稳定性的要求。低频段系统-60 dB/dec,这表明系统必须是无静差系统,具有良好的稳定性,由于低频段分贝值高,可以保证系统的稳定精度;中频段-20 dB/dec 穿过0 dB 线具有一定的宽度,从相位裕度也可以看出系统稳定性好;高频段系统性能为-60 dB/dec,这表明该系统具有良好的噪声抑制能力。
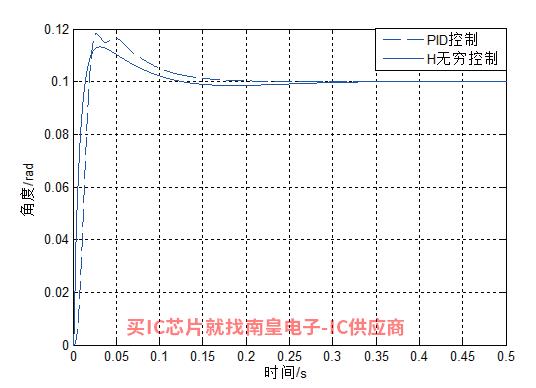
(a)陀螺输出在阶跃响应下
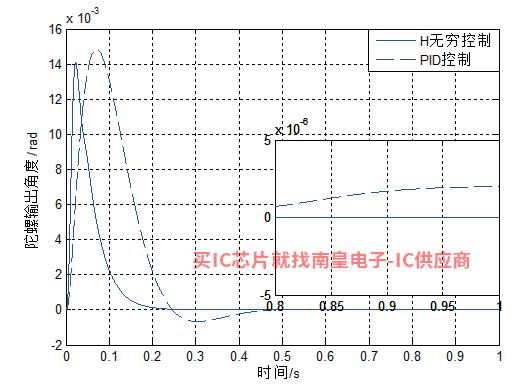
(b)陀螺输出在干扰力矩下
图9 系统响应曲线
对H∞控制稳定电路输入0.1 rad阶跃信号和0.5 N・m 干扰力矩,系统响应曲线。
从图9 可见,采用H∞ 控制后,系统超调量仅为13.7%,调整时间仅为0.089 s,输入常值干扰力矩后,稳定电路的最大值
大动态干扰误差为0.013 7 rad, 稳态误差趋于0。PID 控制和H∞ 对比控制,可以看出系统的超调量、调节时间和抗干扰能力都有了明显的提高。
6 结语
本文应用H∞ 混合灵敏度控制策略控制液浮陀螺的稳定电路。通过选择合适的加权函数,控制结果显著提高了跟踪和抗扰性。通过模拟验证H∞ 与传统控制器相比,控制器的稳定电路稳定PID 双环控制器的稳定电路具有更好的跟踪性和抗扰性,从而证明了该方法的有效性。
参考文献:
[1] 秦永元.惯性导航[M].北京:2006年科学出版社.
[2] 申铁龙.H∞控制理论及应用[M].北京:清华大学出版社,1996.
[3] 薛定宇.计算机辅助设计控制系统-MATLAB语言及应用[M].北京:2012年清华大学出版社.
[4] 刘金琨.先进PID控制MATLAB仿真[M].3版.北京:2011年电子工业出版社.
[5] 吴旭东,解学书.H∞鲁棒控制中加权矩阵的选择[J].1997:29-32.
[6] 李鹏、孟卫锋、陈利超等.模拟研究惯导平台稳定回路的三种控制策略[J].2010(3):672-676,691.
(本文来源《IC2021年1月,代理杂志







- 让我们回顾一下河北开发者中心研究社华为云数字人第一期的专题活动
- ST先进SiC牵引电机逆变器解决方案
- 美媒:苹果将在iPhone用户能接受更多的广告吗?
- 三点思考,通过软件给合作移动机器人更多的智能
- 贸泽电子销售Wi-Fi 6设计的Qorvo QPF4532集成前端模块
- 佳能将于2023年上半年发售3D半导体光刻机的曝光面积是目前的4倍
- 英特尔开源SYCLomatic帮助开发者创建异构代码的迁移工具
- 国产芯片发布芯片教材 为中国未来培养工程师
- 飞行车后,小鹏又烧钱做机器人了!为什么汽车公司喜欢做副业?
- 迎接人机合作的未来,就在今天!
- 美欲组芯片四方联盟包围中国
- 350W AC/DC超窄壳开关电源―― LMF350-23BxxUH
